Inzwischen hat mich auch das Solarfieber gepackt. In loser Folge werde ich hier meine Anlage beschreiben und Einzelaspekte herauspicken.
Update: Neuere Pylontech Akkus, das heißt spätestens ab Soft Version 2.0
|
1 2 3 4 5 |
Main Soft version : B69.25.0.0 Soft version : V2.0 Boot version : V1.0 Comm version : V2.0 Release Date : 24-05-13 |
haben eine neue Datenstruktur in ihrer Konsole, was dazu führt, dass der JSON und MQTT Output des PylontechMonitoring fälschlicherweise Null Volt und "Alarm!" anzeigt. Lösung: siehe neue Firmware weiter unten
Inhalt
Wohin mit dem Überschuss?
Mein "Guerilla-Kraftwerk" erzeugt theoretisch 1760Wp. Aufgrund der suboptimalen Ausrichtung nach WNW waren es im vergangenen Sommer lediglich ca. 1300W Maximalleistung. Die Module liegen mit 12° recht flach, was die schlechte Ausrichtung etwas kompensiert.
Immerhin habe ich im ersten halben Jahr 710kW Strom erzeugt. Standort ist Norditalien.
Wenn die Schwimmbadpumpe nicht an ist, entsteht ein ganz ordentlicher Überschuss, den ich für 0 ct/kWh den Elektrizitätswerken schenke. Begrenzt auf die in Italien erlaubten 800W.
Also wohin also mit dem Überschuss? Zum Experimentieren – man willl ja nicht gleich in die Vollen gehen – habe ich mir für knapp 600€ einen Pylontech US2000C Akku mit einer Nennkapazität von 2,4kWh und 48V besorgt, um eine AC Ladelösung zu konstruieren. Anders als bei DC Laden wird der Ladestrom nicht direkt aus den Modulen über einen Laderegler in die Batterie gepumpt, sondern der bereits in Wechselstrom (AC) umgewandelte Überschuss zurück in Gleichstrom umgewandelt und dann in die Batterie gespeist anstatt ins Netz. Das mehrfache Umwandeln ist energetisch nicht optimal aber bei einem "Balkonkraftwerk" sehr viel einfacher zu realisieren. Ebenso bei der Nachrüstung – es muss an den existierenden Komponenten nichts geändert werden. Außerdem können die Batterien an einem beliebigen Ort im Haus oder der Wohnung untergebracht werden. Steckdose reicht.
Anfang 2024, also im Winter passiert zwar in punkto Überschuss wenig, aber zum Basteln und Programmieren reicht's. Inspiriert hat mich ein YouTube Beitrag von Offys Werkstatt.
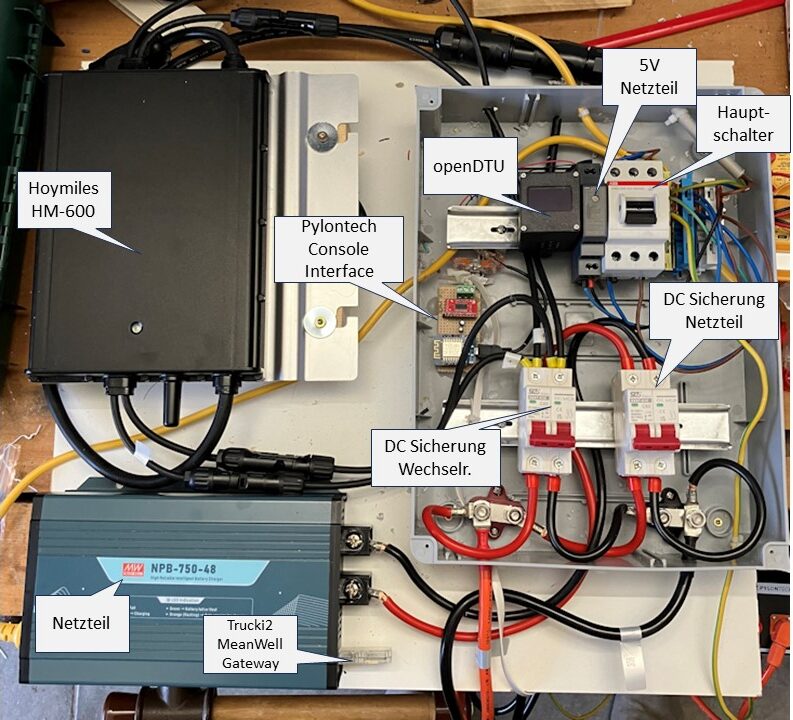
Geladen wird der Akku mit einem Meanwell NBP-750 Netzteil, gesteuert über einen Trucki2Meanwell Gateway Stick.
Entladen wird der Akku, d.h. ins Hausnetz eingespeist wird mit einem übrig gebliebenen – zur Batterieeinspeisung zweckentfremdeten – Hoymiles HM-600 Wechselrichter, dessen Daten über eine openDTU ausgelesen und mit einer selbst entwickelten Node-Red Logik steuerungstechnisch verarbeitet werden.

Den gesamten ziemlich eklektischen Setup werde ich in verschiedenen Beiträgen noch beleuchten.
Pylontech US2000C
Auf das Selberbasteln eines Akkupacks hatte ich wenig Lust, zumal die Ersparnis nicht besonders groß gewesen wäre.
Vorteile des Pylontech Teils sind die Erweiterbarkeit, ein vernünftiges Batterie Management System mit Soft Start – schont den Wechselrichter – und die Möglichkeit den Akkuzustand über eine einfache, kleine Logik auszulesen und zu manipulieren.
Noch ein Hinweis: Die hier beschriebene Lösung geht wahrscheinlich nur mit den Pylontech "C" Modellen wie US2000C etc., da diese den Aufweck-Kontakt im 8 poligen RJ45 Console Port des Gerätes haben. Die aktuelleren US5000 (da gibt's kein "C" Modell) haben auch den Aufweckkontakt.
Die älteren Modelle ohne "C", also US2000, US3000, US2000B etc. haben einen vierpoligen RJ10/RJ11 Console Port. Lt. Handbuch gibt es dort keinen Aufweck-Kontakt.
Pylontech Battery Monitoring via WiFi
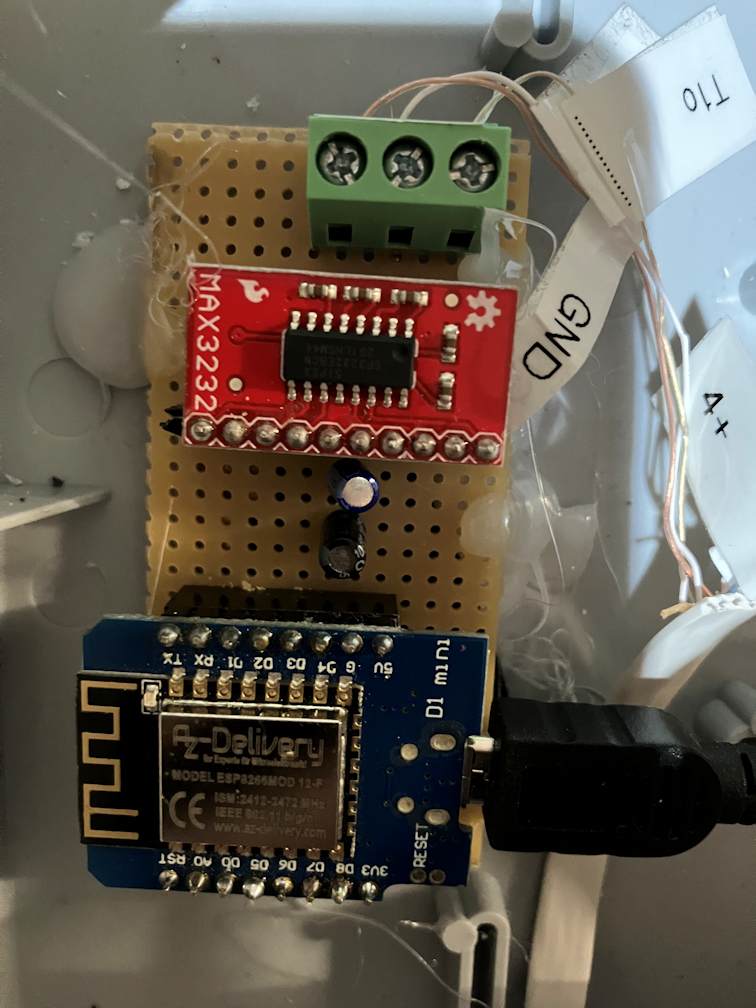
Ireneusz Zielinski hat schon vor einiger Zeit ein Projekt auf Github bereit gestellt, mit dem sich der Akku über WiFi monitoren lässt. Es besteht im Wesentlichen aus einem ESP8266 Microcontroller (Wemos D1 Mini), einem Max3232 Transceiver, zwei Kondensatoren, einem umgemodelten Netzwerk Kabel und einem USB Netzteil. Fertig! Alle wesentlichen Infos finden sich auf Github. Kostenpunkt 25 – 35€.
Damit lässt sich der Akkustatus interaktiv über eine schlichte Weboberfläche auslesen und auch in Grenzen manipulieren – für die Integration in IoT Geschichten gibt es optional MQTT oder eine kleine API die auf Wunsch die Statusinfo auch als JSON ausspuckt. Beides lässt sich hervorragend in Node-Red, Home Assistant oder andere IoT Plattformen integrieren.
Diese Geschichte entwickeln wir jetzt weiter:

Nachteil: Der Wechselrichter zieht immer Strom
Leider zieht der Hoymiles Wechselrichter im Standby (also wenn er gerade nicht wechselt und richtet) ca. 1,8W pro Stunde aus dem Akku. Der State of Charge (SoC) verliert daher täglich ca. 1,5%. Das ist irgendwie blöd.
Ich könnte natürlich den Wechselrichter DC seitig mit einem Leistungsrelais komplett von der Batterie tennen. Da immerhin 12A Stromstärke zu schalten sind und größeren Hardware Aufwand erfordert, habe ich davon Abstand genommen. Die Wechselrichter-schonende "Soft Start" Funktion, welche die Spannung beim Hochfahren nicht schlagartig sondern langsam ansteigen lässt, fällt beim Schalten über Relais natürlich flach. Man kann das zwar wieder über kaskadiert geschaltete Vorwiderstände lösen aber so türmt sich Aufwand über Aufwand.
Einfacher und billiger (<5€) geht es mit Bordmitteln über die oben beschriebene Monitoring Konsole: Der Akku hat nämlich eine Shutdown Funktion, die über die Konsole ausgelöst werden kann. Zum Beispiel so:
|
1 |
http://192.168.178.69/req?code=shut |
Nur, sobald der Akku im Standby ist, kann ich ihn nicht so einfach über die Konsole aufwecken, weil die ja auch abgeschaltet ist.
Aufwecken über Pin 4 und 5
In der Betriebsanleitung des Akkus steht aber sinngemäß: Legt man an Pin 4 (Plus) und Pin 5 (Minus) des Console Ports für ≥0,5 Sekunden ein Signal von 5-12 Volt und 5-15 mA an, wird der Akku wieder aufgeweckt.
Das können wir mit dem sowieso schon vorhandenen D1 Mini und etwas Hardware recht einfach realisieren.
Hardware Erweiterung mit Tochterplatine
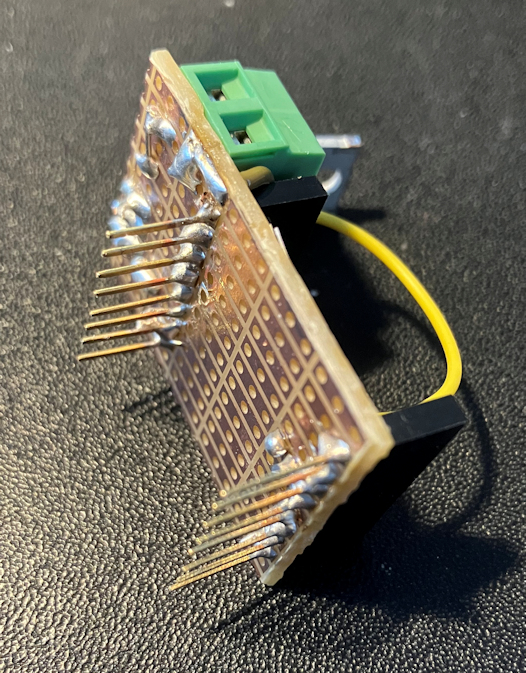
Wenn ihr die Console Platine schon gebaut und – so wie ich – fest montiert (verklebt) habt, dann habt ihr den D1 Mini hoffentlich auf Stiftsockelleisten montiert. Dann können wir eine Piggyback- oder Tochterplatine für die Wakeup Schaltung bauen und dazwischen stecken. Die neue Platine hat für den D1 Stiftsockelleisten mit längeren Beinchen (Stacking Header) damit man sie auf die Console Platine aufstecken kann. Der D1 Mini obendrauf und fertig.
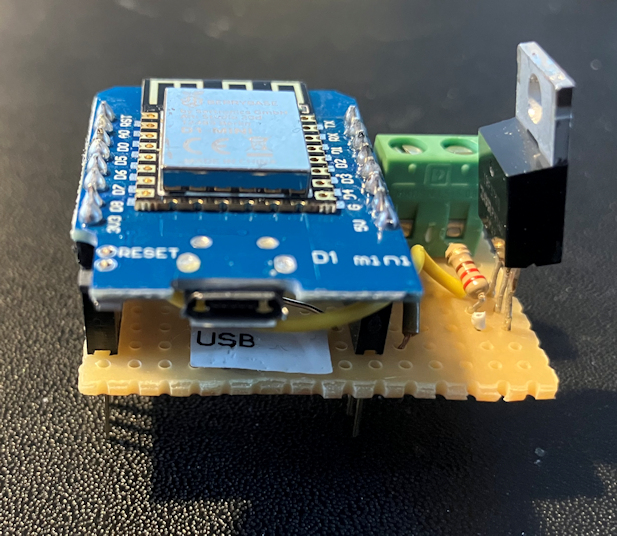
Falls der D1 Mini fest verlötet ist, müsst ihr eben an die 5V, GND und D5 Pins Drähte löten und die Platine anderweitig unterbringen oder alles neu bauen.
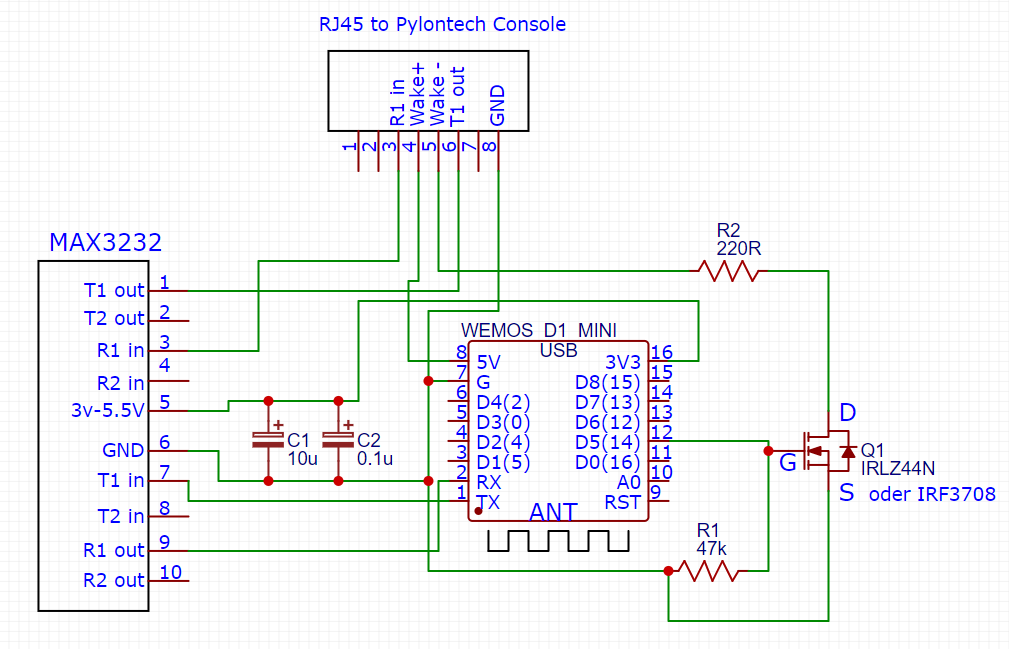
Schaltplan zum Nachrüsten
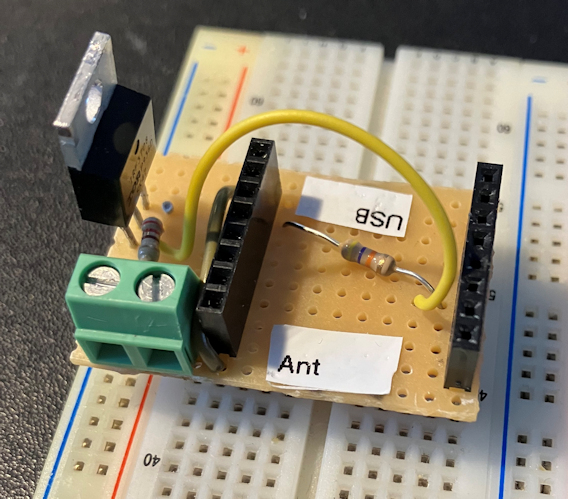
Nachdem wir den Sketch angepasst haben (siehe weiter unten) können wir einen http Request an den Microcontroller schicken (z.B. http://192.168.178.69/wakeup). Damit wird der Pin D5 für ein paar Sekunden auf High gesetzt. Die 3.3V reichen aber nicht, das Signal direkt einzuspeisen. Auch die max. 12mA Leistung der GPIO Pins ist eher grenzwertig. Deshalb wird das Ganze mit der 5V Versorgungsspannung gelöst, die über den MOSFET als Schalter und den 220 Ohm Vorwiderstand an den Pylontech Akku weitergeleitet wird.
Geht Pin D5 auf High, schaltet der MOSFET durch und der Strom fließt wie gewünscht. Natürlich müsst ihr dazu beim zweckentfremdeten Netzwerkkabel zum Console Port noch zwei Leitungen (zu Pin 4 und 5) freilegen und anschließen.
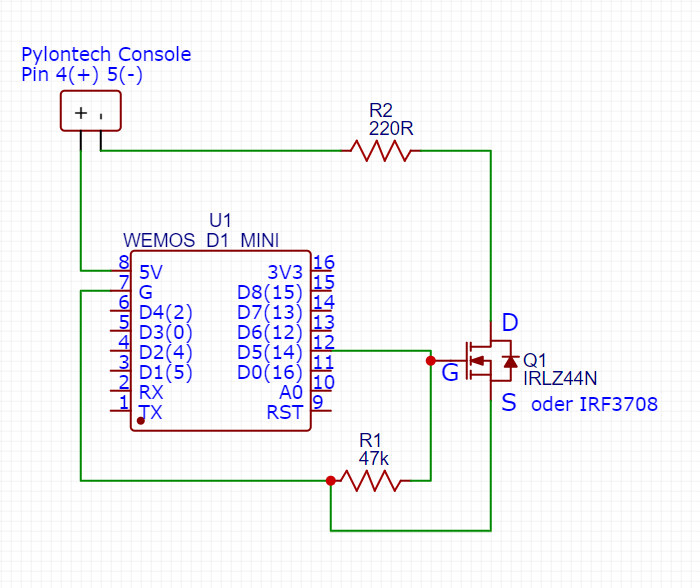
Der Pulldown Widerstand R1 ist wichtig, damit der MOSFET sauber sperrt. Der Widerstand R2 dient dazu, den Strom zu Pin4 bzw. Pin5 in den definierten Grenzen zu halten.
Auch hier führen wieder viele Wege nach Rom: Anstatt des MOSFET könnte man auch einen Transistor, ein Relais oder einen Optokoppler verwenden. Ich habe das hergenommen, was ich in meiner Bastelkiste gefunden habe.
Stückliste
- Den D1 Mini haben wir ja schon.
- 1 Logic Level n-Kanal MOSFET z.B. IRLZ44N oder alternativ und evtl. besser IRF3708 (derzeit schlecht verfügbar) oder einen anderen Logic Level n-Kanal MOSFET
- 1 Pulldown Widerstand mit 47k Ohm
- 1 Vorwiderstand mit 220 Ohm oder 320 Ohm
- Dazu 1 Paar Stacking Header – ist im D1 Pack enthalten, wenn ihr das noch nicht weggeworfen habt 😉
- 1 lötbare 2er Schraubklemme
- kleines Stück Punkt-/Streifenraster Platine – am besten mit 3er Punktreihen – z.B. Rademacher 790
Software Erweiterung
Hier nun der Arduino Sketch. Die von mir eingefügten Erweiterungen sind gelb hervorgehoben.
Sketch für ältere Pylontech Firmware
Ich empfehle, versuchsweise diese Version zu installieren; wenn bei der Ausgabe von JSON oder MQTT Output Null Volt und "Alarm!" erscheint, bitte den Sketch für die neuere Firmware (vermutlich ab Soft Version V2.0) verwenden.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 716 717 718 719 720 721 722 723 724 725 726 727 728 729 730 731 732 733 734 735 736 737 738 739 740 741 742 743 744 745 746 747 748 749 750 751 752 753 754 755 756 757 758 759 760 761 762 763 764 765 766 767 768 769 770 771 772 773 774 775 776 777 778 779 780 781 782 783 784 |
/* Original software by Ireneusz Zielinski https://github.com/irekzielinski/Pylontech-Battery-Monitoring Addition of Wakeup Command (/wakeup) by Christoph Krzikalla (www.rustimation.eu) reqires extra hardware to send 5V Signal to Pylontech battery console pin 4 and 5. Will only work with "C" Models of Pylontech Battery (US2000C etc. and newer US5000). Instructions for this specific version @ https://www.rustimation.eu/index.php/solar-pylontech-akku-ueber-konsole-aufwecken IMPORTANT: Also follow the instructions on Ireneusz Github pages. Libraries can be downloaded @ https://github.com/irekzielinski/Pylontech-Battery-Monitoring/tree/master/libraries Make sure to copy the content of that subdirectory to the libraries directory of your Arduino IDE. Also, make sure that the IDEs debug setting ist set to OFF or None */ #include <ESP8266WiFi.h> #include <ESP8266mDNS.h> #include <ArduinoOTA.h> #include <ESP8266WebServer.h> //#include <ESP8266WebServer.h> #include <SimpleTimer.h> #include <TimeLib.h> //https://github.com/PaulStoffregen/Time #include <ntp_time.h> #include <circular_log.h> int battPinout = 14; // Assign pin for wakeup Signal trigger i.e: D5 on D1Mini //IMPORTANT: Specify your WIFI settings: #define WIFI_SSID "YourWiFiNetwork SSID" #define WIFI_PASS "yourSuperSecretPreSharedKey" //IMPORTANT: Uncomment this line if you want to enable MQTT (and fill correct MQTT_ values below): //#define ENABLE_MQTT #ifdef ENABLE_MQTT //NOTE 1: if you want to change what is pushed via MQTT - edit function: pushBatteryDataToMqtt. //NOTE 2: MQTT_TOPIC_ROOT is where battery will push MQTT topics. For example "soc" will be pushed to: "home/grid_battery/soc" #define MQTT_SERVER "yourMQTTServerNameOrIPAdress" #define MQTT_PORT 1883 #define MQTT_USER "user" #define MQTT_PASSWORD "password" #define MQTT_TOPIC_ROOT "battery/pylontech/" //this is where mqtt data will be pushed #define MQTT_PUSH_FREQ_SEC 2 //maximum mqtt update frequency in seconds #include <PubSubClient.h> WiFiClient espClient; PubSubClient mqttClient(espClient); #endif //ENABLE_MQTT char g_szRecvBuff[7000]; ESP8266WebServer server(80); SimpleTimer timer; circular_log<7000> g_log; bool ntpTimeReceived = false; int g_baudRate = 0; void Log(const char* msg) { g_log.Log(msg); } void setup() { pinMode(LED_BUILTIN, OUTPUT); digitalWrite(LED_BUILTIN, HIGH);//high is off pinMode(battPinout, OUTPUT); // put your setup code here, to run once: WiFi.mode(WIFI_STA); WiFi.persistent(false); //our credentialss are hardcoded, so we don't need ESP saving those each boot (will save on flash wear) WiFi.hostname("PylontechBattery"); WiFi.begin(WIFI_SSID, WIFI_PASS); for(int ix=0; ix<10; ix++) { if(WiFi.status() == WL_CONNECTED) { break; } delay(1000); } ArduinoOTA.setHostname("RusticoBattery"); ArduinoOTA.begin(); server.on("/wakeup", handleBattWakeup); //<-- added by CKr server.on("/", handleRoot); server.on("/log", handleLog); server.on("/req", handleReq); server.on("/jsonOut", handleJsonOut); server.on("/reboot", [](){ ESP.restart(); }); server.begin(); syncTime(); #ifdef ENABLE_MQTT mqttClient.setServer(MQTT_SERVER, MQTT_PORT); #endif Log("Boot event"); } void handleLog() { server.send(200, "text/html", g_log.c_str()); } void switchBaud(int newRate) { if(g_baudRate == newRate) { return; } if(g_baudRate != 0) { Serial.flush(); delay(20); Serial.end(); delay(20); } char szMsg[50]; snprintf(szMsg, sizeof(szMsg)-1, "New baud: %d", newRate); Log(szMsg); Serial.begin(newRate); g_baudRate = newRate; delay(20); } void waitForSerial() { for(int ix=0; ix<150;ix++) { if(Serial.available()) break; delay(10); } } int readFromSerial() { memset(g_szRecvBuff, 0, sizeof(g_szRecvBuff)); int recvBuffLen = 0; bool foundTerminator = true; waitForSerial(); while(Serial.available()) { char szResponse[256] = ""; const int readNow = Serial.readBytesUntil('>', szResponse, sizeof(szResponse)-1); //all commands terminate with "$$\r\n\rpylon>" (no new line at the end) if(readNow > 0 && szResponse[0] != '\0') { if(readNow + recvBuffLen + 1 >= (int)(sizeof(g_szRecvBuff))) { Log("WARNING: Read too much data on the console!"); break; } strcat(g_szRecvBuff, szResponse); recvBuffLen += readNow; if(strstr(g_szRecvBuff, "$$\r\n\rpylon")) { strcat(g_szRecvBuff, ">"); //readBytesUntil will skip this, so re-add foundTerminator = true; break; //found end of the string } if(strstr(g_szRecvBuff, "Press [Enter] to be continued,other key to exit")) { //we need to send new line character so battery continues the output Serial.write("\r"); } waitForSerial(); } } if(recvBuffLen > 0 ) { if(foundTerminator == false) { Log("Failed to find pylon> terminator"); } } return recvBuffLen; } bool readFromSerialAndSendResponse() { const int recvBuffLen = readFromSerial(); if(recvBuffLen > 0) { server.sendContent(g_szRecvBuff); return true; } return false; } bool sendCommandAndReadSerialResponse(const char* pszCommand) { switchBaud(115200); if(pszCommand[0] != '\0') { Serial.write(pszCommand); } Serial.write("\n"); const int recvBuffLen = readFromSerial(); if(recvBuffLen > 0) { return true; } //wake up console and try again: wakeUpConsole(); if(pszCommand[0] != '\0') { Serial.write(pszCommand); } Serial.write("\n"); return readFromSerial() > 0; } void handleReq() { bool respOK; if(server.hasArg("code") == false) { respOK = sendCommandAndReadSerialResponse(""); } else { respOK = sendCommandAndReadSerialResponse(server.arg("code").c_str()); } if(respOK) { server.send(200, "text/plain", g_szRecvBuff); } else { server.send(500, "text/plain", "????"); } } void handleJsonOut() { if(sendCommandAndReadSerialResponse("pwr") == false) { server.send(500, "text/plain", "Failed to get response to 'pwr' command"); return; } parsePwrResponse(g_szRecvBuff); prepareJsonOutput(g_szRecvBuff, sizeof(g_szRecvBuff)); server.send(200, "application/json", g_szRecvBuff); } // ++++++++++++++Addition by CKr //Routine zum Einschalten der Batterie void handleBattWakeup() { digitalWrite(battPinout, HIGH); // send wakeup signal delay(5000); // wait for a second digitalWrite(battPinout, LOW); // turn off wakeup signal server.send(200, "text/html", "Wakeup signal sent..."); } //++++++++++++++End Addition void handleRoot() { unsigned long days = 0, hours = 0, minutes = 0; unsigned long val = os_getCurrentTimeSec(); days = val / (3600*24); val -= days * (3600*24); hours = val / 3600; val -= hours * 3600; minutes = val / 60; val -= minutes*60; static char szTmp[2500] = ""; snprintf(szTmp, sizeof(szTmp)-1, "<html><b>2.4kWh Pylontech US2000C</b><br>Time GMT: %d/%02d/%02d %02d:%02d:%02d (%s)<br>Uptime: %02d:%02d:%02d.%02d<br><br>free heap: %u<br>Wifi RSSI: %d<BR>Wifi SSID: %s", year(), month(), day(), hour(), minute(), second(), "GMT", (int)days, (int)hours, (int)minutes, (int)val, ESP.getFreeHeap(), WiFi.RSSI(), WiFi.SSID().c_str()); strncat(szTmp, "<BR><a href='/log'>Runtime log</a><HR>", sizeof(szTmp)-1); strncat(szTmp, "<form action='/req' method='get'>Command:<input type='text' name='code'/><input type='submit'></form><a href='/req?code=pwr'>Power</a> | <a href='/req?code=help'>Help</a> | <a href='/req?code=log'>Event Log</a> | <a href='/req?code=time'>Time</a>", sizeof(szTmp)-1); strncat(szTmp, "</html>", sizeof(szTmp)-1); server.send(200, "text/html", szTmp); } unsigned long os_getCurrentTimeSec() { static unsigned int wrapCnt = 0; static unsigned long lastVal = 0; unsigned long currentVal = millis(); if(currentVal < lastVal) { wrapCnt++; } lastVal = currentVal; unsigned long seconds = currentVal/1000; //millis will wrap each 50 days, as we are interested only in seconds, let's keep the wrap counter return (wrapCnt*4294967) + seconds; } void syncTime() { //get time from NTP time_t currentTimeGMT = getNtpTime(); if(currentTimeGMT) { ntpTimeReceived = true; setTime(currentTimeGMT); } else { timer.setTimeout(5000, syncTime); //try again in 5 seconds } } void wakeUpConsole() { switchBaud(1200); //byte wakeUpBuff[] = {0x7E, 0x32, 0x30, 0x30, 0x31, 0x34, 0x36, 0x38, 0x32, 0x43, 0x30, 0x30, 0x34, 0x38, 0x35, 0x32, 0x30, 0x46, 0x43, 0x43, 0x33, 0x0D}; //Serial.write(wakeUpBuff, sizeof(wakeUpBuff)); Serial.write("~20014682C0048520FCC3\r"); delay(1000); byte newLineBuff[] = {0x0E, 0x0A}; switchBaud(115200); for(int ix=0; ix<10; ix++) { Serial.write(newLineBuff, sizeof(newLineBuff)); delay(1000); if(Serial.available()) { while(Serial.available()) { Serial.read(); } break; } } } #define MAX_PYLON_BATTERIES 8 struct pylonBattery { bool isPresent; long soc; //Coulomb in % long voltage; //in mW long current; //in mA, negative value is discharge long tempr; //temp of case or BMS? long cellTempLow; long cellTempHigh; long cellVoltLow; long cellVoltHigh; char baseState[9]; //Charge | Dischg | Idle char voltageState[9]; //Normal char currentState[9]; //Normal char tempState[9]; //Normal char time[20]; //2019-06-08 04:00:29 char b_v_st[9]; //Normal (battery voltage?) char b_t_st[9]; //Normal (battery temperature?) bool isCharging() const { return strcmp(baseState, "Charge") == 0; } bool isDischarging() const { return strcmp(baseState, "Dischg") == 0; } bool isIdle() const { return strcmp(baseState, "Idle") == 0; } bool isBalancing() const { return strcmp(baseState, "Balance") == 0; } bool isNormal() const { if(isCharging() == false && isDischarging() == false && isIdle() == false && isBalancing() == false) { return false; //base state looks wrong! } return strcmp(voltageState, "Normal") == 0 && strcmp(currentState, "Normal") == 0 && strcmp(tempState, "Normal") == 0 && strcmp(b_v_st, "Normal") == 0 && strcmp(b_t_st, "Normal") == 0 ; } }; struct batteryStack { int batteryCount; int soc; //in %, if charging: average SOC, otherwise: lowest SOC int temp; //in mC, if highest temp is > 15C, this will show the highest temp, otherwise the lowest long currentDC; //mAh current going in or out of the battery long avgVoltage; //in mV char baseState[9]; //Charge | Dischg | Idle | Balance | Alarm! pylonBattery batts[MAX_PYLON_BATTERIES]; bool isNormal() const { for(int ix=0; ix<MAX_PYLON_BATTERIES; ix++) { if(batts[ix].isPresent && batts[ix].isNormal() == false) { return false; } } return true; } //in wH long getPowerDC() const { return (long)(((double)currentDC/1000.0)*((double)avgVoltage/1000.0)); } //wH estimated current on AC side (taking into account Sofar ME3000SP losses) long getEstPowerAc() const { double powerDC = (double)getPowerDC(); if(powerDC == 0) { return 0; } else if(powerDC < 0) { //we are discharging, on AC side we will see less power due to losses if(powerDC < -1000) { return (long)(powerDC*0.94); } else if(powerDC < -600) { return (long)(powerDC*0.90); } else { return (long)(powerDC*0.87); } } else { //we are charging, on AC side we will have more power due to losses if(powerDC > 1000) { return (long)(powerDC*1.06); } else if(powerDC > 600) { return (long)(powerDC*1.1); } else { return (long)(powerDC*1.13); } } } }; batteryStack g_stack; long extractInt(const char* pStr, int pos) { return atol(pStr+pos); } void extractStr(const char* pStr, int pos, char* strOut, int strOutSize) { strOut[strOutSize-1] = '\0'; strncpy(strOut, pStr+pos, strOutSize-1); strOutSize--; //trim right while(strOutSize > 0) { if(isspace(strOut[strOutSize-1])) { strOut[strOutSize-1] = '\0'; } else { break; } strOutSize--; } } /* Output has mixed \r and \r\n pwr @ Power Volt Curr Tempr Tlow Thigh Vlow Vhigh Base.St Volt.St Curr.St Temp.St Coulomb Time B.V.St B.T.St 1 49735 -1440 22000 19000 19000 3315 3317 Dischg Normal Normal Normal 93% 2019-06-08 04:00:30 Normal Normal .... 8 - - - - - - - Absent - - - - - - - Command completed successfully $$ pylon */ bool parsePwrResponse(const char* pStr) { if(strstr(pStr, "Command completed successfully") == NULL) { return false; } int chargeCnt = 0; int dischargeCnt = 0; int idleCnt = 0; int alarmCnt = 0; int socAvg = 0; int socLow = 0; int tempHigh = 0; int tempLow = 0; memset(&g_stack, 0, sizeof(g_stack)); for(int ix=0; ix<MAX_PYLON_BATTERIES; ix++) { char szToFind[32] = ""; snprintf(szToFind, sizeof(szToFind)-1, "\r\r\n%d ", ix+1); const char* pLineStart = strstr(pStr, szToFind); if(pLineStart == NULL) { return false; } pLineStart += 3; //move past \r\r\n extractStr(pLineStart, 55, g_stack.batts[ix].baseState, sizeof(g_stack.batts[ix].baseState)); if(strcmp(g_stack.batts[ix].baseState, "Absent") == 0) { g_stack.batts[ix].isPresent = false; } else { g_stack.batts[ix].isPresent = true; extractStr(pLineStart, 64, g_stack.batts[ix].voltageState, sizeof(g_stack.batts[ix].voltageState)); extractStr(pLineStart, 73, g_stack.batts[ix].currentState, sizeof(g_stack.batts[ix].currentState)); extractStr(pLineStart, 82, g_stack.batts[ix].tempState, sizeof(g_stack.batts[ix].tempState)); extractStr(pLineStart, 100, g_stack.batts[ix].time, sizeof(g_stack.batts[ix].time)); extractStr(pLineStart, 121, g_stack.batts[ix].b_v_st, sizeof(g_stack.batts[ix].b_v_st)); extractStr(pLineStart, 130, g_stack.batts[ix].b_t_st, sizeof(g_stack.batts[ix].b_t_st)); g_stack.batts[ix].voltage = extractInt(pLineStart, 6); g_stack.batts[ix].current = extractInt(pLineStart, 13); g_stack.batts[ix].tempr = extractInt(pLineStart, 20); g_stack.batts[ix].cellTempLow = extractInt(pLineStart, 27); g_stack.batts[ix].cellTempHigh = extractInt(pLineStart, 34); g_stack.batts[ix].cellVoltLow = extractInt(pLineStart, 41); g_stack.batts[ix].cellVoltHigh = extractInt(pLineStart, 48); g_stack.batts[ix].soc = extractInt(pLineStart, 91); //////////////////////////////// Post-process //////////////////////// g_stack.batteryCount++; g_stack.currentDC += g_stack.batts[ix].current; g_stack.avgVoltage += g_stack.batts[ix].voltage; socAvg += g_stack.batts[ix].soc; if(g_stack.batts[ix].isNormal() == false){ alarmCnt++; } else if(g_stack.batts[ix].isCharging()){chargeCnt++;} else if(g_stack.batts[ix].isDischarging()){dischargeCnt++;} else if(g_stack.batts[ix].isIdle()){idleCnt++;} else{ alarmCnt++; } //should not really happen! if(g_stack.batteryCount == 1) { socLow = g_stack.batts[ix].soc; tempLow = g_stack.batts[ix].cellTempLow; tempHigh = g_stack.batts[ix].cellTempHigh; } else { if(socLow > g_stack.batts[ix].soc){socLow = g_stack.batts[ix].soc;} if(tempHigh < g_stack.batts[ix].cellTempHigh){tempHigh = g_stack.batts[ix].cellTempHigh;} if(tempLow > g_stack.batts[ix].cellTempLow){tempLow = g_stack.batts[ix].cellTempLow;} } } } //now update stack state: g_stack.avgVoltage /= g_stack.batteryCount; g_stack.soc = socLow; if(tempHigh > 15000) //15C { g_stack.temp = tempHigh; //in the summer we highlight the warmest cell } else { g_stack.temp = tempLow; //in the winter we focus on coldest cell } if(alarmCnt > 0) { strcpy(g_stack.baseState, "Alarm!"); } else if(chargeCnt == g_stack.batteryCount) { strcpy(g_stack.baseState, "Charge"); g_stack.soc = (int)(socAvg / g_stack.batteryCount); } else if(dischargeCnt == g_stack.batteryCount) { strcpy(g_stack.baseState, "Dischg"); } else if(idleCnt == g_stack.batteryCount) { strcpy(g_stack.baseState, "Idle"); } else { strcpy(g_stack.baseState, "Balance"); } return true; } void prepareJsonOutput(char* pBuff, int buffSize) { memset(pBuff, 0, buffSize); snprintf(pBuff, buffSize-1, "{\"soc\": %d, \"temp\": %d, \"currentDC\": %ld, \"avgVoltage\": %ld, \"baseState\": \"%s\", \"batteryCount\": %d, \"powerDC\": %ld, \"estPowerAC\": %ld, \"isNormal\": %s}", g_stack.soc, g_stack.temp, g_stack.currentDC, g_stack.avgVoltage, g_stack.baseState, g_stack.batteryCount, g_stack.getPowerDC(), g_stack.getEstPowerAc(), g_stack.isNormal() ? "true" : "false"); } void loop() { #ifdef ENABLE_MQTT mqttLoop(); #endif ArduinoOTA.handle(); server.handleClient(); timer.run(); //if there are bytes availbe on serial here - it's unexpected //when we send a command to battery, we read whole response //if we get anything here anyways - we will log it int bytesAv = Serial.available(); if(bytesAv > 0) { if(bytesAv > 63) { bytesAv = 63; } char buff[64+4] = "RCV:"; if(Serial.readBytes(buff+4, bytesAv) > 0) { digitalWrite(LED_BUILTIN, LOW); delay(5); digitalWrite(LED_BUILTIN, HIGH);//high is off Log(buff); } } } #ifdef ENABLE_MQTT #define ABS_DIFF(a, b) (a > b ? a-b : b-a) void mqtt_publish_f(const char* topic, float newValue, float oldValue, float minDiff, bool force) { char szTmp[16] = ""; snprintf(szTmp, 15, "%.2f", newValue); if(force || ABS_DIFF(newValue, oldValue) > minDiff) { mqttClient.publish(topic, szTmp, false); } } void mqtt_publish_i(const char* topic, int newValue, int oldValue, int minDiff, bool force) { char szTmp[16] = ""; snprintf(szTmp, 15, "%d", newValue); if(force || ABS_DIFF(newValue, oldValue) > minDiff) { mqttClient.publish(topic, szTmp, false); } } void mqtt_publish_s(const char* topic, const char* newValue, const char* oldValue, bool force) { if(force || strcmp(newValue, oldValue) != 0) { mqttClient.publish(topic, newValue, false); } } void pushBatteryDataToMqtt(const batteryStack& lastSentData, bool forceUpdate /* if true - we will send all data regardless if it's the same */) { mqtt_publish_f(MQTT_TOPIC_ROOT "soc", g_stack.soc, lastSentData.soc, 0, forceUpdate); mqtt_publish_f(MQTT_TOPIC_ROOT "temp", (float)g_stack.temp/1000.0, (float)lastSentData.temp/1000.0, 0, forceUpdate); mqtt_publish_i(MQTT_TOPIC_ROOT "estPowerAC", g_stack.getEstPowerAc(), lastSentData.getEstPowerAc(), 10, forceUpdate); mqtt_publish_i(MQTT_TOPIC_ROOT "battery_count",g_stack.batteryCount, lastSentData.batteryCount, 0, forceUpdate); mqtt_publish_s(MQTT_TOPIC_ROOT "base_state", g_stack.baseState, lastSentData.baseState , forceUpdate); mqtt_publish_i(MQTT_TOPIC_ROOT "is_normal", g_stack.isNormal() ? 1:0, lastSentData.isNormal() ? 1:0, 0, forceUpdate); } void mqttLoop() { //if we have problems with connecting to mqtt server, we will attempt to re-estabish connection each 1minute (not more than that) static unsigned long g_lastConnectionAttempt = 0; //first: let's make sure we are connected to mqtt const char* topicLastWill = MQTT_TOPIC_ROOT "availability"; if (!mqttClient.connected() && (g_lastConnectionAttempt == 0 || os_getCurrentTimeSec() - g_lastConnectionAttempt > 60)) { if(mqttClient.connect("RusticoBattery", MQTT_USER, MQTT_PASSWORD, topicLastWill, 1, true, "offline")) { Log("Connected to MQTT server: " MQTT_SERVER); mqttClient.publish(topicLastWill, "online", true); } else { Log("Failed to connect to MQTT server."); } g_lastConnectionAttempt = os_getCurrentTimeSec(); } //next: read data from battery and send via MQTT (but only once per MQTT_PUSH_FREQ_SEC seconds) static unsigned long g_lastDataSent = 0; if(mqttClient.connected() && os_getCurrentTimeSec() - g_lastDataSent > MQTT_PUSH_FREQ_SEC && sendCommandAndReadSerialResponse("pwr") == true) { static batteryStack lastSentData; //this is the last state we sent to MQTT, used to prevent sending the same data over and over again static unsigned int callCnt = 0; parsePwrResponse(g_szRecvBuff); bool forceUpdate = (callCnt % 20 == 0); //push all the data every 20th call pushBatteryDataToMqtt(lastSentData, forceUpdate); callCnt++; g_lastDataSent = os_getCurrentTimeSec(); memcpy(&lastSentData, &g_stack, sizeof(batteryStack)); } mqttClient.loop(); } #endif //ENABLE_MQTT |
Sketch für neue Pylontech Firmware
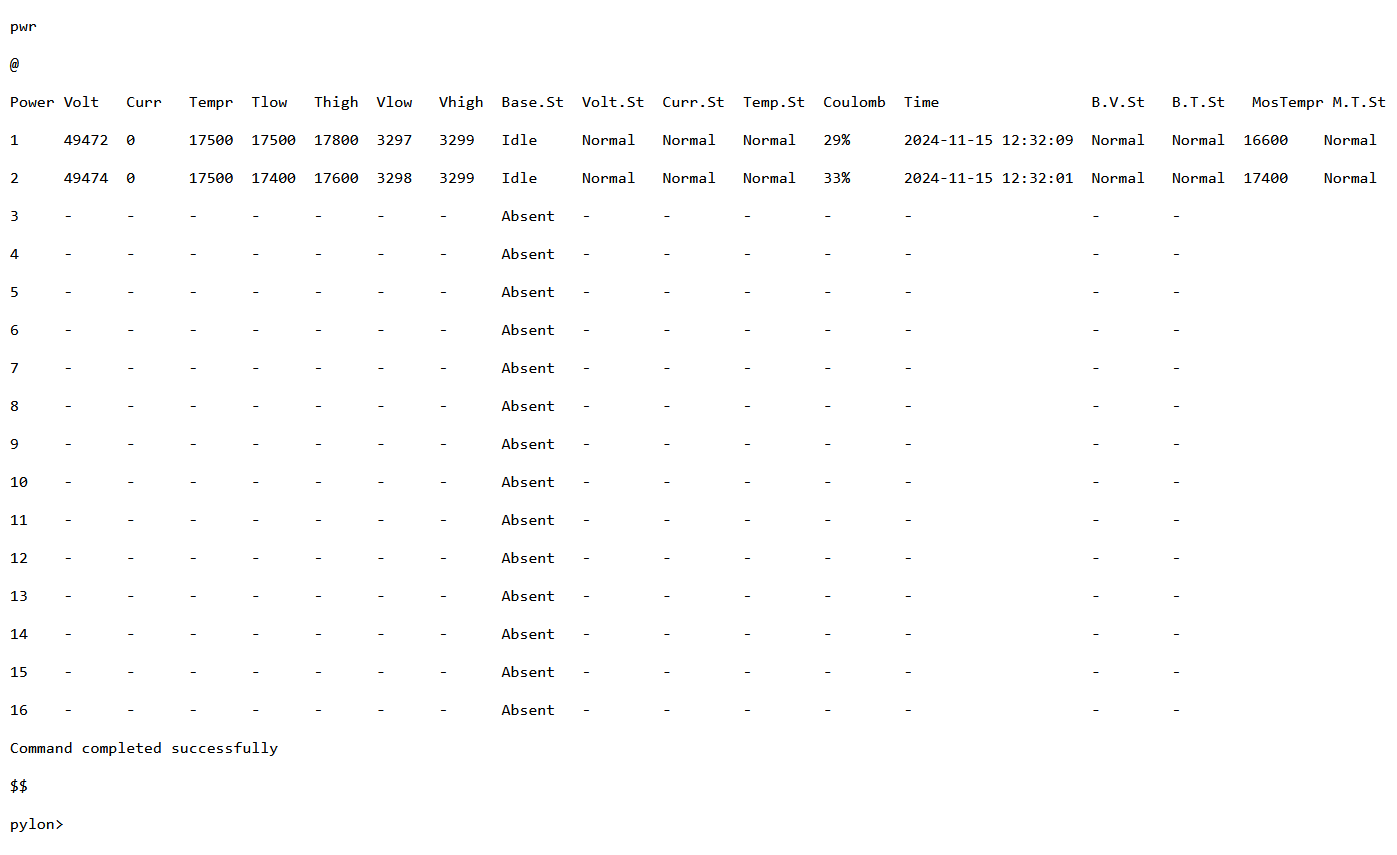
Zumindest beim US5000 mit Firmware ab 24-05-13 (oder evtl auch etwas vorher) hat der Output des Pylontech internen pwr Befehls eine andere Struktur.
Beispiel alte Struktur
Beispiel neue Struktur
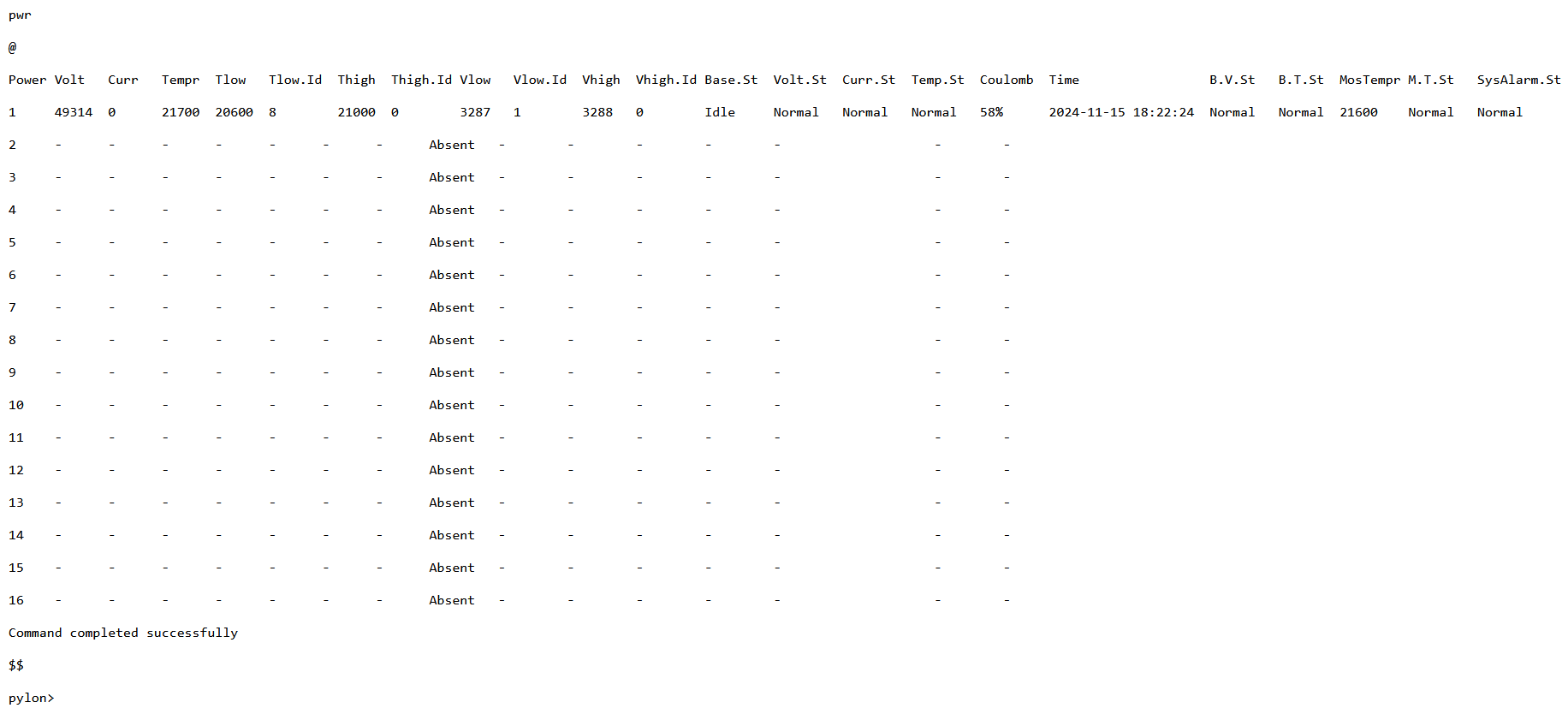
Für den JSON bzw. MQTT Output des PylontechMonitoring werden die Parameter in der pwr Tabelle anhand ihrer Position in der jeweiligen Zeile geparsed. Zum Beispiel befindet sich der baseState (Charge/Dischg/Idle/Balance) anstatt an Position 55 jetzt an Stelle 91. Das führt natürlich zu einer größeren Verwirrung mit dem Effekt, dass JSON und MQTT nicht funktionieren.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 716 717 718 719 720 721 722 723 724 725 726 727 728 729 730 731 732 733 734 735 736 737 738 739 740 741 742 743 744 745 746 747 748 749 750 751 752 753 754 755 756 757 758 759 760 761 762 763 764 765 766 767 768 769 770 771 772 773 774 775 776 777 778 779 780 781 782 783 784 785 786 787 788 789 |
/* Original software by Ireneusz Zielinski https://github.com/irekzielinski/Pylontech-Battery-Monitoring Addition of Wakeup Command (/wakeup) by Christoph Krzikalla (www.rustimation.eu) reqires extra hardware to send 5V Signal to Pylontech battery console pin 4 and 5. Will only work with "C" Models of Pylontech Battery (US2000C etc. and newer US5000). Instructions for this specific version @ https://www.rustimation.eu/index.php/solar-pylontech-akku-ueber-konsole-aufwecken IMPORTANT: Also follow the instructions on Ireneusz Github pages. Libraries can be downloaded @ https://github.com/irekzielinski/Pylontech-Battery-Monitoring/tree/master/libraries Make sure to copy the content of that subdirectory to the libraries directory of your Arduino IDE. UPDATED VERSION to reflect new output structure of the built-in pwr response. Also, make sure that the IDEs debug setting ist set to OFF or None*/ #include <ESP8266WiFi.h> #include <ESP8266mDNS.h> #include <ArduinoOTA.h> #include <ESP8266WebServer.h> //#include <ESP8266WebServer.h> #include <SimpleTimer.h> #include <TimeLib.h> //https://github.com/PaulStoffregen/Time #include <ntp_time.h> #include <circular_log.h> int battPinout = 14; // Assign pin for wakeup Signal trigger i.e: D5 on D1Mini //IMPORTANT: Specify your WIFI settings: #define WIFI_SSID "YourWiFiNetwork SSID" #define WIFI_PASS "yourSuperSecretPreSharedKey" //IMPORTANT: Uncomment this line if you want to enable MQTT (and fill correct MQTT_ values below): //#define ENABLE_MQTT #ifdef ENABLE_MQTT //NOTE 1: if you want to change what is pushed via MQTT - edit function: pushBatteryDataToMqtt. //NOTE 2: MQTT_TOPIC_ROOT is where battery will push MQTT topics. For example "soc" will be pushed to: "home/grid_battery/soc" #define MQTT_SERVER "yourMQTTServerNameOrIPAdress" #define MQTT_PORT 1883 #define MQTT_USER "user" #define MQTT_PASSWORD "password" #define MQTT_TOPIC_ROOT "battery/pylontech/" //this is where mqtt data will be pushed #define MQTT_PUSH_FREQ_SEC 2 //maximum mqtt update frequency in seconds #include <PubSubClient.h> WiFiClient espClient; PubSubClient mqttClient(espClient); #endif //ENABLE_MQTT char g_szRecvBuff[7000]; ESP8266WebServer server(80); SimpleTimer timer; circular_log<7000> g_log; bool ntpTimeReceived = false; int g_baudRate = 0; void Log(const char* msg) { g_log.Log(msg); } void setup() { pinMode(LED_BUILTIN, OUTPUT); digitalWrite(LED_BUILTIN, HIGH);//high is off pinMode(battPinout, OUTPUT); // put your setup code here, to run once: WiFi.mode(WIFI_STA); WiFi.persistent(false); //our credentialss are hardcoded, so we don't need ESP saving those each boot (will save on flash wear) WiFi.hostname("PylontechBattery"); WiFi.begin(WIFI_SSID, WIFI_PASS); for(int ix=0; ix<10; ix++) { if(WiFi.status() == WL_CONNECTED) { break; } delay(1000); } ArduinoOTA.setHostname("RusticoBattery"); ArduinoOTA.begin(); server.on("/wakeup", handleBattWakeup); //<-- added by CKr server.on("/", handleRoot); server.on("/log", handleLog); server.on("/req", handleReq); server.on("/jsonOut", handleJsonOut); server.on("/reboot", [](){ ESP.restart(); }); server.begin(); syncTime(); #ifdef ENABLE_MQTT mqttClient.setServer(MQTT_SERVER, MQTT_PORT); #endif Log("Boot event"); } void handleLog() { server.send(200, "text/html", g_log.c_str()); } void switchBaud(int newRate) { if(g_baudRate == newRate) { return; } if(g_baudRate != 0) { Serial.flush(); delay(20); Serial.end(); delay(20); } char szMsg[50]; snprintf(szMsg, sizeof(szMsg)-1, "New baud: %d", newRate); Log(szMsg); Serial.begin(newRate); g_baudRate = newRate; delay(20); } void waitForSerial() { for(int ix=0; ix<150;ix++) { if(Serial.available()) break; delay(10); } } int readFromSerial() { memset(g_szRecvBuff, 0, sizeof(g_szRecvBuff)); int recvBuffLen = 0; bool foundTerminator = true; waitForSerial(); while(Serial.available()) { char szResponse[256] = ""; const int readNow = Serial.readBytesUntil('>', szResponse, sizeof(szResponse)-1); //all commands terminate with "$$\r\n\rpylon>" (no new line at the end) if(readNow > 0 && szResponse[0] != '\0') { if(readNow + recvBuffLen + 1 >= (int)(sizeof(g_szRecvBuff))) { Log("WARNING: Read too much data on the console!"); break; } strcat(g_szRecvBuff, szResponse); recvBuffLen += readNow; if(strstr(g_szRecvBuff, "$$\r\n\rpylon")) { strcat(g_szRecvBuff, ">"); //readBytesUntil will skip this, so re-add foundTerminator = true; break; //found end of the string } if(strstr(g_szRecvBuff, "Press [Enter] to be continued,other key to exit")) { //we need to send new line character so battery continues the output Serial.write("\r"); } waitForSerial(); } } if(recvBuffLen > 0 ) { if(foundTerminator == false) { Log("Failed to find pylon> terminator"); } } return recvBuffLen; } bool readFromSerialAndSendResponse() { const int recvBuffLen = readFromSerial(); if(recvBuffLen > 0) { server.sendContent(g_szRecvBuff); return true; } return false; } bool sendCommandAndReadSerialResponse(const char* pszCommand) { switchBaud(115200); if(pszCommand[0] != '\0') { Serial.write(pszCommand); } Serial.write("\n"); const int recvBuffLen = readFromSerial(); if(recvBuffLen > 0) { return true; } //wake up console and try again: wakeUpConsole(); if(pszCommand[0] != '\0') { Serial.write(pszCommand); } Serial.write("\n"); return readFromSerial() > 0; } void handleReq() { bool respOK; if(server.hasArg("code") == false) { respOK = sendCommandAndReadSerialResponse(""); } else { respOK = sendCommandAndReadSerialResponse(server.arg("code").c_str()); } if(respOK) { server.send(200, "text/plain", g_szRecvBuff); } else { server.send(500, "text/plain", "????"); } } void handleJsonOut() { if(sendCommandAndReadSerialResponse("pwr") == false) { server.send(500, "text/plain", "Failed to get response to 'pwr' command"); return; } parsePwrResponse(g_szRecvBuff); prepareJsonOutput(g_szRecvBuff, sizeof(g_szRecvBuff)); server.send(200, "application/json", g_szRecvBuff); } // ++++++++++++++Addition by CKr //Routine zum Einschalten der Batterie void handleBattWakeup() { digitalWrite(battPinout, HIGH); // send wakeup signal delay(5000); // wait for a second digitalWrite(battPinout, LOW); // turn off wakeup signal server.send(200, "text/html", "Wakeup signal sent..."); } //++++++++++++++End Addition void handleRoot() { unsigned long days = 0, hours = 0, minutes = 0; unsigned long val = os_getCurrentTimeSec(); days = val / (3600*24); val -= days * (3600*24); hours = val / 3600; val -= hours * 3600; minutes = val / 60; val -= minutes*60; static char szTmp[2500] = ""; snprintf(szTmp, sizeof(szTmp)-1, "<html><b>2.4kWh Pylontech US2000C</b><br>Time GMT: %d/%02d/%02d %02d:%02d:%02d (%s)<br>Uptime: %02d:%02d:%02d.%02d<br><br>free heap: %u<br>Wifi RSSI: %d<BR>Wifi SSID: %s", year(), month(), day(), hour(), minute(), second(), "GMT", (int)days, (int)hours, (int)minutes, (int)val, ESP.getFreeHeap(), WiFi.RSSI(), WiFi.SSID().c_str()); strncat(szTmp, "<BR><a href='/log'>Runtime log</a><HR>", sizeof(szTmp)-1); strncat(szTmp, "<form action='/req' method='get'>Command:<input type='text' name='code'/><input type='submit'></form><a href='/req?code=pwr'>Power</a> | <a href='/req?code=help'>Help</a> | <a href='/req?code=log'>Event Log</a> | <a href='/req?code=time'>Time</a>", sizeof(szTmp)-1); strncat(szTmp, "</html>", sizeof(szTmp)-1); server.send(200, "text/html", szTmp); } unsigned long os_getCurrentTimeSec() { static unsigned int wrapCnt = 0; static unsigned long lastVal = 0; unsigned long currentVal = millis(); if(currentVal < lastVal) { wrapCnt++; } lastVal = currentVal; unsigned long seconds = currentVal/1000; //millis will wrap each 50 days, as we are interested only in seconds, let's keep the wrap counter return (wrapCnt*4294967) + seconds; } void syncTime() { //get time from NTP time_t currentTimeGMT = getNtpTime(); if(currentTimeGMT) { ntpTimeReceived = true; setTime(currentTimeGMT); } else { timer.setTimeout(5000, syncTime); //try again in 5 seconds } } void wakeUpConsole() { switchBaud(1200); //byte wakeUpBuff[] = {0x7E, 0x32, 0x30, 0x30, 0x31, 0x34, 0x36, 0x38, 0x32, 0x43, 0x30, 0x30, 0x34, 0x38, 0x35, 0x32, 0x30, 0x46, 0x43, 0x43, 0x33, 0x0D}; //Serial.write(wakeUpBuff, sizeof(wakeUpBuff)); Serial.write("~20014682C0048520FCC3\r"); delay(1000); byte newLineBuff[] = {0x0E, 0x0A}; switchBaud(115200); for(int ix=0; ix<10; ix++) { Serial.write(newLineBuff, sizeof(newLineBuff)); delay(1000); if(Serial.available()) { while(Serial.available()) { Serial.read(); } break; } } } #define MAX_PYLON_BATTERIES 8 struct pylonBattery { bool isPresent; long soc; //Coulomb in % long voltage; //in mW long current; //in mA, negative value is discharge long tempr; //temp of case or BMS? long cellTempLow; long cellTempHigh; long cellVoltLow; long cellVoltHigh; char isAbsent[7]; // new variable for "Absent" Marker to stop iteration <<<<<<<<<<<<<<<<<<<<<<<<<<<<< char baseState[9]; //Charge | Dischg | Idle char voltageState[9]; //Normal char currentState[9]; //Normal char tempState[9]; //Normal char time[20]; //2019-06-08 04:00:29 char b_v_st[9]; //Normal (battery voltage?) char b_t_st[9]; //Normal (battery temperature?) bool isCharging() const { return strcmp(baseState, "Charge") == 0; } bool isDischarging() const { return strcmp(baseState, "Dischg") == 0; } bool isIdle() const { return strcmp(baseState, "Idle") == 0; } bool isBalancing() const { return strcmp(baseState, "Balance") == 0; } bool isNormal() const { if(isCharging() == false && isDischarging() == false && isIdle() == false && isBalancing() == false) { return false; //base state looks wrong! } return strcmp(voltageState, "Normal") == 0 && strcmp(currentState, "Normal") == 0 && strcmp(tempState, "Normal") == 0 && strcmp(b_v_st, "Normal") == 0 && strcmp(b_t_st, "Normal") == 0 ; } }; struct batteryStack { int batteryCount; int soc; //in %, if charging: average SOC, otherwise: lowest SOC int temp; //in mC, if highest temp is > 15C, this will show the highest temp, otherwise the lowest long currentDC; //mAh current going in or out of the battery long avgVoltage; //in mV char baseState[9]; //Charge | Dischg | Idle | Balance | Alarm! pylonBattery batts[MAX_PYLON_BATTERIES]; bool isNormal() const { for(int ix=0; ix<MAX_PYLON_BATTERIES; ix++) { if(batts[ix].isPresent && batts[ix].isNormal() == false) { return false; } } return true; } //in wH long getPowerDC() const { return (long)(((double)currentDC/1000.0)*((double)avgVoltage/1000.0)); } //wH estimated current on AC side (taking into account Sofar ME3000SP losses) long getEstPowerAc() const { double powerDC = (double)getPowerDC(); if(powerDC == 0) { return 0; } else if(powerDC < 0) { //we are discharging, on AC side we will see less power due to losses if(powerDC < -1000) { return (long)(powerDC*0.94); } else if(powerDC < -600) { return (long)(powerDC*0.90); } else { return (long)(powerDC*0.87); } } else { //we are charging, on AC side we will have more power due to losses if(powerDC > 1000) { return (long)(powerDC*1.06); } else if(powerDC > 600) { return (long)(powerDC*1.1); } else { return (long)(powerDC*1.13); } } } }; batteryStack g_stack; long extractInt(const char* pStr, int pos) { return atol(pStr+pos); } void extractStr(const char* pStr, int pos, char* strOut, int strOutSize) { strOut[strOutSize-1] = '\0'; strncpy(strOut, pStr+pos, strOutSize-1); strOutSize--; //trim right while(strOutSize > 0) { if(isspace(strOut[strOutSize-1])) { strOut[strOutSize-1] = '\0'; } else { break; } strOutSize--; } } /* Output has mixed \r and \r\n pwr @ Power Volt Curr Tempr Tlow Thigh Vlow Vhigh Base.St Volt.St Curr.St Temp.St Coulomb Time B.V.St B.T.St 1 49735 -1440 22000 19000 19000 3315 3317 Dischg Normal Normal Normal 93% 2019-06-08 04:00:30 Normal Normal .... 8 - - - - - - - Absent - - - - - - - Command completed successfully $$ pylon */ bool parsePwrResponse(const char* pStr) { if(strstr(pStr, "Command completed successfully") == NULL) { return false; } int chargeCnt = 0; int dischargeCnt = 0; int idleCnt = 0; int alarmCnt = 0; int socAvg = 0; int socLow = 0; int tempHigh = 0; int tempLow = 0; memset(&g_stack, 0, sizeof(g_stack)); for(int ix=0; ix<MAX_PYLON_BATTERIES; ix++) { char szToFind[32] = ""; snprintf(szToFind, sizeof(szToFind)-1, "\r\r\n%d ", ix+1); const char* pLineStart = strstr(pStr, szToFind); if(pLineStart == NULL) { return false; } pLineStart += 3; //move past \r\r\n extractStr(pLineStart, 91, g_stack.batts[ix].baseState, sizeof(g_stack.batts[ix].baseState));// ########## new offset 91 instead of 50 extractStr(pLineStart, 55, g_stack.batts[ix].isAbsent, sizeof(g_stack.batts[ix].isAbsent)); // ########## new variable for check of "Absent" text ######### if(strcmp(g_stack.batts[ix].isAbsent, "Absent") == 0) // ########## changed from baseState to isAbsent { g_stack.batts[ix].isPresent = false; } else { g_stack.batts[ix].isPresent = true; extractStr(pLineStart, 100, g_stack.batts[ix].voltageState, sizeof(g_stack.batts[ix].voltageState)); // ########## new offset extractStr(pLineStart, 109, g_stack.batts[ix].currentState, sizeof(g_stack.batts[ix].currentState)); // ########## new offset extractStr(pLineStart, 118, g_stack.batts[ix].tempState, sizeof(g_stack.batts[ix].tempState)); // ########## new offset extractStr(pLineStart, 136, g_stack.batts[ix].time, sizeof(g_stack.batts[ix].time)); // ########## new offset extractStr(pLineStart, 157, g_stack.batts[ix].b_v_st, sizeof(g_stack.batts[ix].b_v_st)); // ########## new offset extractStr(pLineStart, 166, g_stack.batts[ix].b_t_st, sizeof(g_stack.batts[ix].b_t_st)); // ########## new offset g_stack.batts[ix].voltage = extractInt(pLineStart, 6); g_stack.batts[ix].current = extractInt(pLineStart, 13); g_stack.batts[ix].tempr = extractInt(pLineStart, 20); g_stack.batts[ix].cellTempLow = extractInt(pLineStart, 27); g_stack.batts[ix].cellTempHigh = extractInt(pLineStart, 43); // ########## new offset g_stack.batts[ix].cellVoltLow = extractInt(pLineStart, 59); // ########## new offset g_stack.batts[ix].cellVoltHigh = extractInt(pLineStart, 75); // ########## new offset g_stack.batts[ix].soc = extractInt(pLineStart, 127); // ########## new offset //////////////////////////////// Post-process //////////////////////// g_stack.batteryCount++; g_stack.currentDC += g_stack.batts[ix].current; g_stack.avgVoltage += g_stack.batts[ix].voltage; socAvg += g_stack.batts[ix].soc; if(g_stack.batts[ix].isNormal() == false){ alarmCnt++; } else if(g_stack.batts[ix].isCharging()){chargeCnt++;} else if(g_stack.batts[ix].isDischarging()){dischargeCnt++;} else if(g_stack.batts[ix].isIdle()){idleCnt++;} else{ alarmCnt++; } //should not really happen! if(g_stack.batteryCount == 1) { socLow = g_stack.batts[ix].soc; tempLow = g_stack.batts[ix].cellTempLow; tempHigh = g_stack.batts[ix].cellTempHigh; } else { if(socLow > g_stack.batts[ix].soc){socLow = g_stack.batts[ix].soc;} if(tempHigh < g_stack.batts[ix].cellTempHigh){tempHigh = g_stack.batts[ix].cellTempHigh;} if(tempLow > g_stack.batts[ix].cellTempLow){tempLow = g_stack.batts[ix].cellTempLow;} } } } //now update stack state: g_stack.avgVoltage /= g_stack.batteryCount; g_stack.soc = socLow; if(tempHigh > 15000) //15C { g_stack.temp = tempHigh; //in the summer we highlight the warmest cell } else { g_stack.temp = tempLow; //in the winter we focus on coldest cell } if(alarmCnt > 0) { strcpy(g_stack.baseState, "Alarm!"); } else if(chargeCnt == g_stack.batteryCount) { strcpy(g_stack.baseState, "Charge"); g_stack.soc = (int)(socAvg / g_stack.batteryCount); } else if(dischargeCnt == g_stack.batteryCount) { strcpy(g_stack.baseState, "Dischg"); } else if(idleCnt == g_stack.batteryCount) { strcpy(g_stack.baseState, "Idle"); } else { strcpy(g_stack.baseState, "Balance"); } return true; } void prepareJsonOutput(char* pBuff, int buffSize) { memset(pBuff, 0, buffSize); snprintf(pBuff, buffSize-1, "{\"soc\": %d, \"temp\": %d, \"currentDC\": %ld, \"avgVoltage\": %ld, \"baseState\": \"%s\", \"batteryCount\": %d, \"powerDC\": %ld, \"estPowerAC\": %ld, \"isNormal\": %s}", g_stack.soc, g_stack.temp, g_stack.currentDC, g_stack.avgVoltage, g_stack.baseState, g_stack.batteryCount, g_stack.getPowerDC(), g_stack.getEstPowerAc(), g_stack.isNormal() ? "true" : "false"); } void loop() { #ifdef ENABLE_MQTT mqttLoop(); #endif ArduinoOTA.handle(); server.handleClient(); timer.run(); //if there are bytes availbe on serial here - it's unexpected //when we send a command to battery, we read whole response //if we get anything here anyways - we will log it int bytesAv = Serial.available(); if(bytesAv > 0) { if(bytesAv > 63) { bytesAv = 63; } char buff[64+4] = "RCV:"; if(Serial.readBytes(buff+4, bytesAv) > 0) { digitalWrite(LED_BUILTIN, LOW); delay(5); digitalWrite(LED_BUILTIN, HIGH);//high is off Log(buff); } } } #ifdef ENABLE_MQTT #define ABS_DIFF(a, b) (a > b ? a-b : b-a) void mqtt_publish_f(const char* topic, float newValue, float oldValue, float minDiff, bool force) { char szTmp[16] = ""; snprintf(szTmp, 15, "%.2f", newValue); if(force || ABS_DIFF(newValue, oldValue) > minDiff) { mqttClient.publish(topic, szTmp, false); } } void mqtt_publish_i(const char* topic, int newValue, int oldValue, int minDiff, bool force) { char szTmp[16] = ""; snprintf(szTmp, 15, "%d", newValue); if(force || ABS_DIFF(newValue, oldValue) > minDiff) { mqttClient.publish(topic, szTmp, false); } } void mqtt_publish_s(const char* topic, const char* newValue, const char* oldValue, bool force) { if(force || strcmp(newValue, oldValue) != 0) { mqttClient.publish(topic, newValue, false); } } void pushBatteryDataToMqtt(const batteryStack& lastSentData, bool forceUpdate /* if true - we will send all data regardless if it's the same */) { mqtt_publish_f(MQTT_TOPIC_ROOT "soc", g_stack.soc, lastSentData.soc, 0, forceUpdate); mqtt_publish_f(MQTT_TOPIC_ROOT "temp", (float)g_stack.temp/1000.0, (float)lastSentData.temp/1000.0, 0, forceUpdate); mqtt_publish_i(MQTT_TOPIC_ROOT "estPowerAC", g_stack.getEstPowerAc(), lastSentData.getEstPowerAc(), 10, forceUpdate); mqtt_publish_i(MQTT_TOPIC_ROOT "battery_count",g_stack.batteryCount, lastSentData.batteryCount, 0, forceUpdate); mqtt_publish_s(MQTT_TOPIC_ROOT "base_state", g_stack.baseState, lastSentData.baseState , forceUpdate); mqtt_publish_i(MQTT_TOPIC_ROOT "is_normal", g_stack.isNormal() ? 1:0, lastSentData.isNormal() ? 1:0, 0, forceUpdate); } void mqttLoop() { //if we have problems with connecting to mqtt server, we will attempt to re-estabish connection each 1minute (not more than that) static unsigned long g_lastConnectionAttempt = 0; //first: let's make sure we are connected to mqtt const char* topicLastWill = MQTT_TOPIC_ROOT "availability"; if (!mqttClient.connected() && (g_lastConnectionAttempt == 0 || os_getCurrentTimeSec() - g_lastConnectionAttempt > 60)) { if(mqttClient.connect("RusticoBattery", MQTT_USER, MQTT_PASSWORD, topicLastWill, 1, true, "offline")) { Log("Connected to MQTT server: " MQTT_SERVER); mqttClient.publish(topicLastWill, "online", true); } else { Log("Failed to connect to MQTT server."); } g_lastConnectionAttempt = os_getCurrentTimeSec(); } //next: read data from battery and send via MQTT (but only once per MQTT_PUSH_FREQ_SEC seconds) static unsigned long g_lastDataSent = 0; if(mqttClient.connected() && os_getCurrentTimeSec() - g_lastDataSent > MQTT_PUSH_FREQ_SEC && sendCommandAndReadSerialResponse("pwr") == true) { static batteryStack lastSentData; //this is the last state we sent to MQTT, used to prevent sending the same data over and over again static unsigned int callCnt = 0; parsePwrResponse(g_szRecvBuff); bool forceUpdate = (callCnt % 20 == 0); //push all the data every 20th call pushBatteryDataToMqtt(lastSentData, forceUpdate); callCnt++; g_lastDataSent = os_getCurrentTimeSec(); memcpy(&lastSentData, &g_stack, sizeof(batteryStack)); } mqttClient.loop(); } #endif //ENABLE_MQTT |
Vorsicht Falle: Serielle Schnittstelle
Der D1 Mini Microcontroller beherrscht leider keinen richtigen Debug Modus. Will man eine eigene Software bauen oder ein vorhandenes Programm weiterentwickeln, behilft man sich üblicherweise mit vielen Serial.println("text"); Statements, die dann in der seriellen Konsole den Inhalt von Variablen wiedergeben oder anzeigen, dass das Programm gerade an eine bestimmten Stelle angekommen ist.
Bei unserem Programm hier geht das leider nicht. Die Serial.println Statements werden nämlich auch an die angeschlossene Pylontech Konsole geschickt und bringen das Monitoring Programm gehörig durcheinander. Nach meinem Verständnis liegt das daran, dass die serielle USB Schnittstelle identisch zu den RX TX Pins auf der Platine ist. Was man eigentlich nur an die Konsole schicken wollte, wird sowohl an die Pins, als auch an die USB Buchse geschickt.
Will man also das oben stehende Monitoring Programm von Ireneus mit anderen Funktionen, z.B. einem Display erweitern, sollte man den D1 Mini während der Entwicklung bzw. beim Debuggen von der Pylontech Batterie trennen.
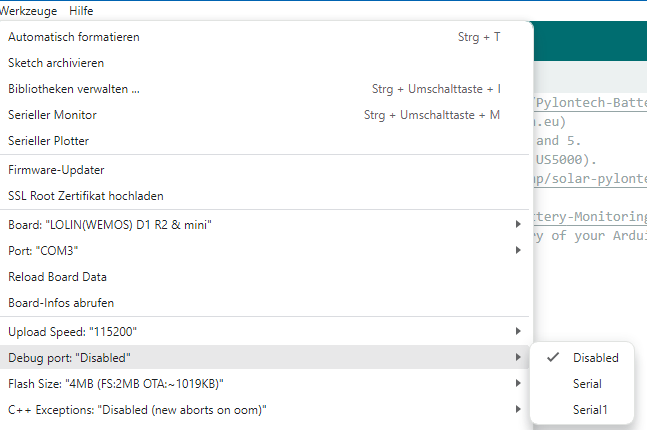
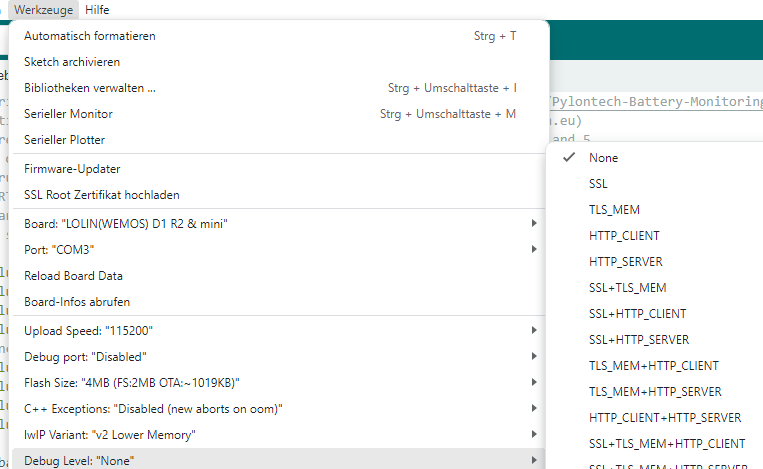
Und nochwas: In letzter Zeit habe ich mit ESP32 Controllern herumexperimentiert, hier kann man den Debug Modus des Arduino IDE prima nutzen – im IDE stellt man unter Werkzeuge den Debugmodus auf eine der beiden Schnittstellen ein und etwas weiter unten, welche Daten über den Debug Port ausgegeben werden sollen.
Nach einem kleinen Update des Konsolensketches habe ich meinen D1 Mini mit aktiviertem Debug Modus neu programmiert und bin dann schier verzweifelt, weil nichts mehr funktioniert hat. Irgend wann bin ich darauf gekommen, was die Ursache war.
Problem ist, vergisst man, beim Programmieren des ESP8266 (D1 Mini) diesen Port wieder zu deaktivieren und die Ausgabe auf "None" zu stellen, kommt Quark heraus. Die ganzen Debug Meldungen wierden jetzt auch an die Batterie geschickt, was zu einer heftigen Verwirrung derselben führt. Sie versteht nur Bahnhof. Der D1 Mini hat zwar bei GPIO 13 (RXD) und 15 (TXD) einen zweiten seriellen Port, aber dieser wird in unserem Sketch nicht genutzt.
Platine von Grund auf neu
Am besten wäre es natürlich, das alles zusammen mit der Console Monitoring Elektronik auf einer einzigen Lochraster-Platine aufzubauen. Hier der Komplett-Schaltplan für die Konsole und den Wakeup.
 Fazit
Fazit
Die oben beschrieben Lösung habe ich jetzt seit über einem Jahr (Stand März 2025) im Echtbetrieb und muss sagen, es funktioniert einwandfrei.
Nach dem Aufwecken des Akkus sollte man darauf achten, dass der Einspeise Wechselrichter nicht ungewollt von selbst lostickert, da der Hoymiles HM600 dann meint, es würde gerade die Sonne aufgehen. Nach einer kurzen Zeit von ca. 15 Sekunden den WR auf "aus" stellen, wenn man gerade nicht einspeisen will. Zum Beispiel weil gerade der Akku lädt.
All das habe ich auch ganz brav auf Github dokumentiert, enstprechend einen Fork der Original Lösung von Ireneusz gezogen.
Hallo, ich habe das Problem das Arduino keine entsprechende Ntp_time.h library findet..ich finde auch keine entsprechende im Netz.
Ja, das einer der Gründe, weshalb ich die Arduino Microcontroller nicht so richtig mag… Immer ist man auf der Suche nach kompatiblen Libraries, die aber schlecht bezeichnet sind.
Du findest die Treiber/Libraries für Ireneus Zielinskis Pylontech auf seiner Github Seite unter https://github.com/irekzielinski/Pylontech-Battery-Monitoring/tree/master/libraries
Ireneus schreibt: Make sure to copy content of libraries subdirectory to libraries of your Arduino IDE.
Danke für den Hinweis, ich werde meine Anleitung entsprechend ergänzen.
VG
Chris
Servus Christoph,
toll wie Du den Pylontech wake up in den code eingepflegt hast, works like a charm.
Planst Du den NR flow auch public zu machen, hätte großes Interesse.
Danke
G.
Hallo und danke für dein Feedback.
Bisher dachte ich, es wäre vielleicht zu trivial, dafür auch noch den NR Flow zu posten…
Hole ich bei Gelegenheit nach.
Im Prinzip brauchst du nur einen HTML Request node der die IP Adresse mit „ipadresse/wakeup“ anspricht.
Momentan bin ich außer Landes, mit dem Handy kann ich keine Tutorials verfassen. Also noch etwas Geduld.
VG
Chris
Hallo, ich meinte den oben angesprochenen NR Flow nämlich:
"Entladen wird der Akku, d.h. ins Hausnetz eingespeist wird mit einem übrig gebliebenen – zur Batterieeinspeisung zweckentfremdeten – Hoymiles HM-600 Wechselrichter, dessen Daten über eine openDTU ausgelesen und mit einer selbst entwickelten Node-Red Logik steuerungstechnisch verarbeitet werden."
der die Lade / Entlade Logik zu steuern scheint.
Das Einspeisen mittels openDTU , Schlafenschicken und Aufwecken der Pylontech's funktioniert dank Deiner Schaltung bzw dem Code von Ireneusz aus NR ja schon perfekt. Ich verwende einen ähnlichen (HM800 statt 600) Setup auch mit Trucki Stick mit zwei Pylontech US2000C's – mich würde interessieren wie Du Deine Logik zur Laderegelung per T2MWG in NR implementiert hast.
Danke schon mal 🙂
Bitte noch ca. 10 Tage Geduld. Jetzt, wo ich weiß, dass jemand das liest, lohnt es sich, das zu beschreiben. 😉
VG
Chris
Hallo,
mein Name ist Hans Joachim Voigt und ich programmiere mit TwinCat3 – Software von Beckhoff / Verl. Ich versuche mit dieser Software Batteriedaten aus einer RS485 Schnittstelle eines US2000c Batteriemoduls auszulesen. Da ich keinerlei Unterstützung von PylonTech erhalte, bitte ich Sie um Unterstützung. Auch wenn Sie eine andere Programmiersprache hier anwenden, so sind Ihnen duch die notwendigen Befehle und Anweisungen bekannt, um diese Daten auszulesen. Ich weiß, dass ich die Schnittstelle öffnen muss, um auf die Daten zugreifen zu können, aber da fängt das Problem schon an. Ein Programmablaufplan würde mir schon sehr helfen, aus dem notwendige Aktionen hervorgehen. Über eine Antwort würde ich mich riesig freuen.
Hallo und danke für Ihr Interesse,
leider habe ich mich RS485 noch überhaupt nicht beschäftigt. Lt. Bedienunganleitung kann der Pylontech US2000C auch RS485. Im Netz gibt es einiges darüber. z.B. hier und hier. Vor allem das zweite Link ist ganz interessant, da es ein PDF Dokument mit Beschreibung des RS485 Protokolls i.V. mit dem Pylontech enthält.
Mehr kann ich momentan leider nicht für Sie tun.
MfG
Christoph Krzikalla